Simulation Results
Lake Dataset
We evaluate our route-planning framework on 2217 graph instances selected from 1052 unique Canadian lakes. The lakes are selected from the CanVec Series Ontario datasets published by Natural Resources Canada. Lakes are filtered such that their bounding boxes are 1-10km by 1-10km. Water masks are generated from Sentine-2 satellite images across 30 days in June 2018-2022. After our graph generation pipeline, we remove any graph with no stochastic edges or more than nine stochastic edges.
Results
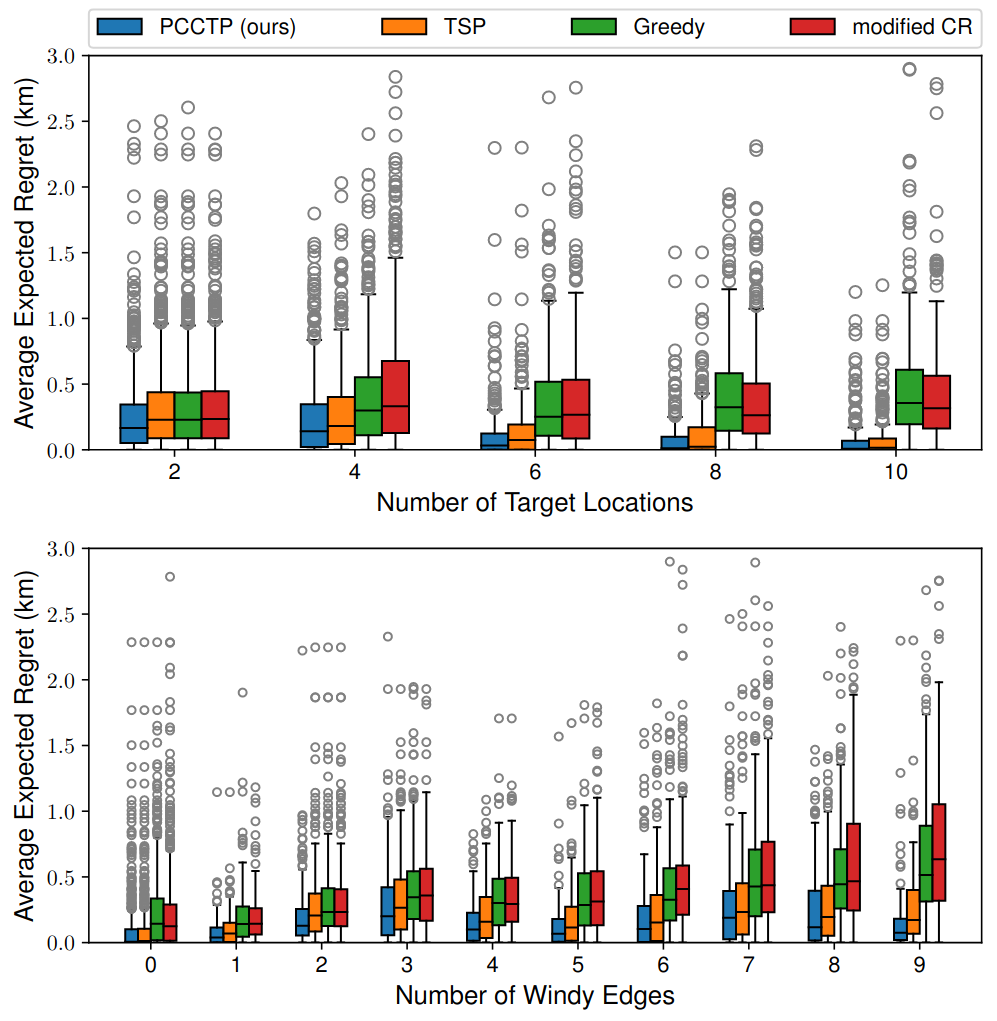
We compare our method, PCCTP, to the following baselines: Greedy, TSP, and a modified version of Cyclic Routing (CR) algorithm used to solve CCTP (Covering Canadian Traveller Problem) .
Compared to the strongest baseline, our method saves the robot about 1%(50m) of travel distance on average and 15%(1.8km) in the extreme case. Although the improvement is marginal on average, our planner can still be beneficial in edge cases (e.g., high blocking probability, long stochastic edges).
Field Tests
We show that our algorithm can be integrated to an ASV navigation system in a field test.
Our ASV platform is a customized Clearpath Heron ASV with a GPS, IMU, ZED stereo camera, and an Nvidia Jetson for processing sensor inputs. The autonomy framework is designed such that the success of policy execution is less dependent on lower-level components such as perception and local planning, making the system more robust.
The system travelled autonomously for 3.7km in our field test at Nine Mile Lake in McDougall, Ontario, Canada. Despite some challenges such as perception failures, limited battery life, and strong wind, the ASV still managed to complete the mission and visited all reachable target nodes.
BibTeX
@article{huang2022stochastic,
title={Stochastic Planning for ASV Navigation Using Satellite Images},
author={Huang, Yizhou and Dugmag, Hamza and Barfoot, Timothy D and Shkurti, Florian},
journal={arXiv preprint arXiv:2209.11864},
year={2022}
}